About Me

Patel
New grad from the University of Michigan with a major in Computer Engineering. I'm interested in software engineering, testing, and embedded systems opportunities with experience in ML and computer vision.
New grad from the University of Michigan with a major in Computer Engineering. I'm interested in software engineering, testing, and embedded systems opportunities with experience in ML and computer vision.
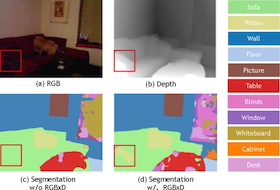
I designed and integrated new testing pipelines, accelerating development process for team’s codebase using Jenkins and Gerrit. I also added code coverage to native test recipes, improving effectiveness of tests by 30% and delivering higher-quality software through CMake, Makefiles, Autotools, Ruby scripts, and BitBake recipes in Yocto.
Sep. 2023 - Dec. 2023I devised block diagrams of devices illustrating interconnectedness in 5+ server racks, providing customers with valuable structural insights. I accomplished this by collaborating with senior engineers to restructure the design of server racks, increasing comprehension of their functionality. I also developed and delivered presentations about multiple projects surrounding block diagrams, and power and cost budgets, enhancing project visibility and understanding among stakeholders.
May 2022 - Aug. 2022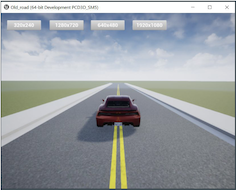
Developed a Simulink model for a vehicle with Adaptive Cruise Control (ACC) and haptic steering, where wheel position controls steering angles and feedback forces. Implemented differential equations to simulate vehicle dynamics, designed logic for speed and position control switching, and integrated a PID-based automatic steering controller while interfacing with hardware components such as ADC, CAN bus, and digital inputs.

Developed projects in JavaScript and HTML5, covering robot middleware architectures and publish-subscribe messaging models, graph search path planning (A* algorithm), basic physical simulation (Lagrangian dynamics, numerical integrators), proportional-integral-derivative (PID) control, forward kinematics (3D geometric matrix transforms, matrix stack composition of transforms, axis-angle rotation by quaternions), inverse kinematics (gradient descent optimization, geometric Jacobian), and motion planning (simple collision detection, sampling-based motion planning).